1.视频
5月30号版本
6月24号版本
2.算法
2.1电机pid
右轮
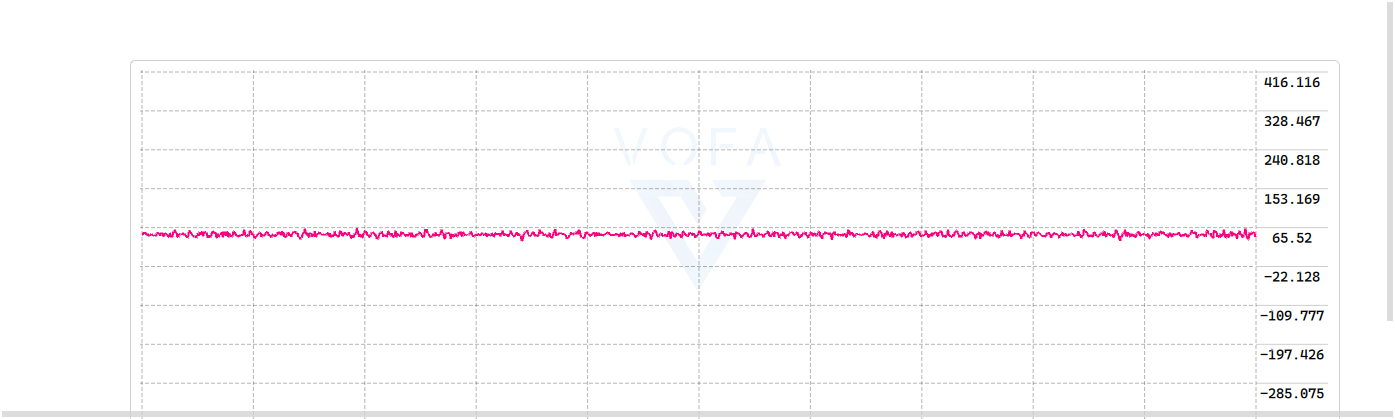
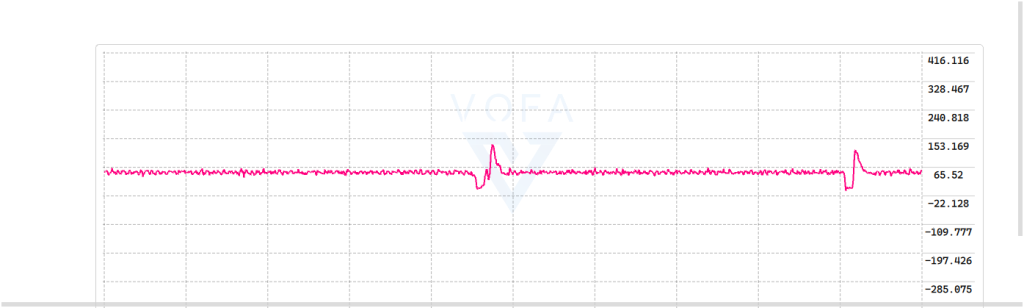
左轮
还可以再磨合磨合
2.2摄像头爬梯
爬梯还有待改进,计划用八近邻识别赛道元素。
3.方法
3.1解决的问题
①右轮编码器值为左轮的三倍左右
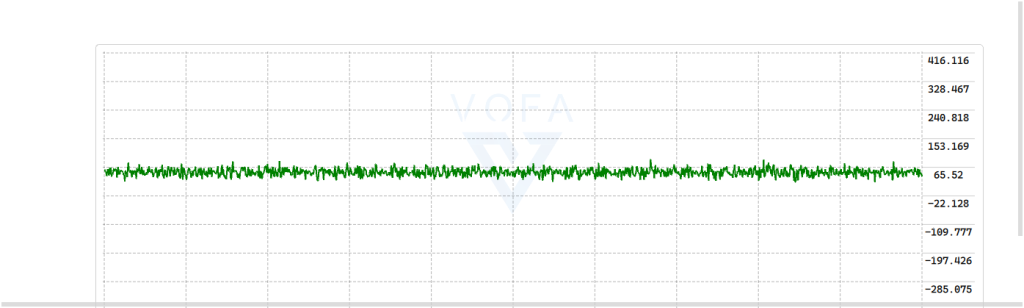
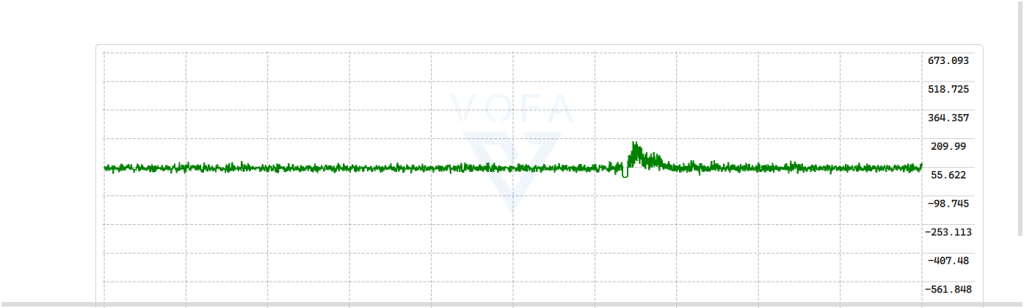
②改善后—上图的pid


③轮胎拐八字—拧紧螺丝有改善
④更换电机后停顿有改善
3.2实现的功能
①没有识别元素低速过
②下阶段识别元素、提速
③部署程序线上调参

![]() ywhao·2022-06-23·1 次阅读
ywhao·2022-06-23·1 次阅读
5月30号版本
6月24号版本
右轮
左轮
还可以再磨合磨合
爬梯还有待改进,计划用八近邻识别赛道元素。
①右轮编码器值为左轮的三倍左右
②改善后—上图的pid
③轮胎拐八字—拧紧螺丝有改善
④更换电机后停顿有改善
①没有识别元素低速过
②下阶段识别元素、提速
③部署程序线上调参


Comments NOTHING